Sensors, safety and machine vision for AGV and robotics
Datasensing has been developing new
sensing, inspection, measurement, and safety solutions for automated guided
vehicles (AGVs) and robotics.
The focus is applications in
manufacturing and material handling, working with the most innovative companies
in these high-growth sectors.
We look in this article at the main
applications and products offered by Datasensing.

Automated guided vehicles (AGV)
Automated
guided vehicles have been around since the 1950s for material handling in
industrial settings.
In
addition to the continuous refinement of power supply and control systems, what
has most marked their evolution over the years has been the automatic guidance
system, which has also determined the difference between different types of
AGVs.
In
fact, they range from the first inductive systems with wire guides or magnets
embedded in the floor, through laser guidance systems with natural or
artificial references on the walls, to the most recent GPS or SLAM (simultaneous
localization and mapping).

Laser guided vehicles (LGV)
The
most modern type of automated guided vehicles are laser-guided vehicles are
also referred to as LGVs.
Datasensing
offers several products for mounting on LGVs, from AM inductive proximity sensors for
detecting metal parts (batteries, outriggers, forks), to S3N miniature
photoelectric sensors with background suppression for detection of materials, UK ultrasonic sensors for
detecting and measuring distances, and ENC optical encoders for speed control.
Finally,
an indispensable element on LGVs is the safety laser scanner, which protects
against collisions with materials or people. In addition to that, it can also
guide navigation in SLAM mode.
SLS safety laser scanners in master and slave mode can be
mounted with up to 4 units on all sides of the AGV to monitor the entire
surrounding area, or even with only 2 units on opposite corners due to the 275°
scanning angle.
Automated Guided Forklift (AGF and LGF)
The most used type of AGV are the automated
guided forklifts are
also referred to as AGFs, or LGF when Laser guided.
These are in fact automated forklifts
used to move pallets within a warehouse or production line.
In addition to the sensor technology
already described for AGVs and LGVs, these forklifts are equipped with a
top-mounted lidar guidance scanner.
The device senses the surrounding area
and thus allows them to map the environment, control movement and avoid
collisions.
Automated guided carts (AGC)
Automated guided carts are vehicles with smaller dimensions, especially for their height.
Between the many applications, some
involve the vehicle itself going directly under a special container to load and
transport it.
Sensors are also reduced in size, and
typically a more compact guidance device with an anti-collision function, such
as the LGS-A10lidar, is preferred.
Industrial robots
The term "Robots," coined in 1920 by Czech
novelist Karel Čapek to define heavy-duty servants, was taken up by Isaac
Asimov in his science fiction novels beginning in the 1940s.
This would already be enough to say what a robot is
and does, but a first official definition came in 1979 from the Robot Institute
of America: "A robot is a reprogrammable, multifunctional manipulator
designed to move materials, parts, tools, or specialized devices through
varying programmed motions for the performance of a variety of tasks.
"A more recent definition of industrial robots comes
from ISO 8373:2021 at 3.1: "robot: programmed
actuated mechanism with a degree of autonomy to
perform locomotion, manipulation or positioning.
A robot includes the control
system.
Examples of mechanical structure of
robots are manipulator, mobile
platform and wearable
robot"
(www.iso.org/obp/ui/fr/#iso:std:iso:8373:ed-3:v1:en)
(www.iso.org/obp/ui/fr/#iso:std:iso:8373:ed-3:v1:en)
Today, the variety of
robots and their applications in both civil and industrial fields is very
diverse.
We can categorize industrial robots according to
their evolution: fixed robots → mobile robots → humanoid mobile robots.
Fixed robot
Robots of this type
have been used in industry since the 1960s.
They are also referred
to as "articulated robots" or "articulated robotic arms".
The definition depends
on its function and morphology.
Today, the most common
manipulator robot typically has up to 5 or 6 rotary joints, allowing it as many
degrees of freedom in its movements.
However, it is a
fixed-position robot, so it is the material that transits and positions itself
in front of the robot for different types of processing (e.g., assembly,
welding, filling, inspection, etc.) or manipulation (e.g., canning,
palletization, movement limited to the robot's range of motion).
Stationary manipulator robots need various sensors for control.
Datasensing has
multiple solutions.
UK ultrasonic sensors detect and measure
distances.
The P2x smart camera can even be mounted on the robot's "hand," allowing it to see the
object to be manipulated and control movements.
Finally, since the
robot is mounted in a fixed position and moves its arm within a certain range,
it is necessary to protect people from entering the robot's work area.

Collaborative robot (Cobot)
A cobot is a robot
designed to work with limited speed and forces allowing it to work closely with
human operators. The advantage resides
in the fact that clear separation of work zones isn't necessary.
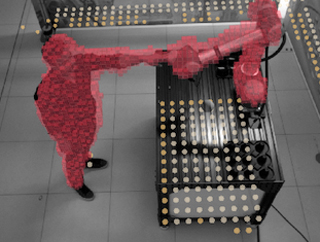
In the search for
collaborative solutions between operators and even noncollaborative robots,
Datalogic, through Datasensing, was the coordinator of the consortium formed to
participate in the European Horizon 2020 framework program on "Effective
Industrial Human-Robot Collaboration" with the ROSSINI project
( https://www.rossini-project.com )
( https://www.rossini-project.com )
The ROSSINI project
resulted in the creation of a platform used for designing and implementing
human-robot collaboration (HRC) applications in manufacturing.
By combining
innovative sensing and identification, actuation, and control technologies
integrated in an open development environment, the ROSSINI platform enabled
experimental HRC applications in which robots and operators collaborate,
increasing the quality of work, production flexibility, efficiency, and, as a
result, productivity.
In
building prototypes dedicated to this project, Datasensing has applied
principles and techniques compatible with safety regulations to vision systems.
Autonomous mobile robots (AMR)
Autonomous mobile robots are basically robotic manipulators mounted on
self-driving vehicles.
Unlike AGVs they can move autonomously
and freely in work areas, with the ability to adapt to new routes or tasks.
Thus, these robots can transport
materials from one place to another, perform moving work, or even interact with
people to receive or provide materials or information.
Datasensing provides SLS safety laser scanners
and LGS lidars,
which are needed to safely maintain and guide the movement of AMRs.
These are an addition to the already
specified sensors for manipulator robots.
One example is the application developed
by Info Solution.
An interesting evolution of AMRs is
space robotics.
An example are vehicles such as the Mars Rover, which can move
on the surface of other planets to make measurements and collect samples.
In this regard,
Datasensing is the technology sponsor and sensor supplier for the Project RED,
of the Department of Engineering Sciences and Methods - UNIMORE of Modena and
Reggio Emilia.
The project aims to create a prototype rover for
extraterrestrial exploration.
This prototype will be used to compete in the European Rover Challenge.
This prototype will be used to compete in the European Rover Challenge.


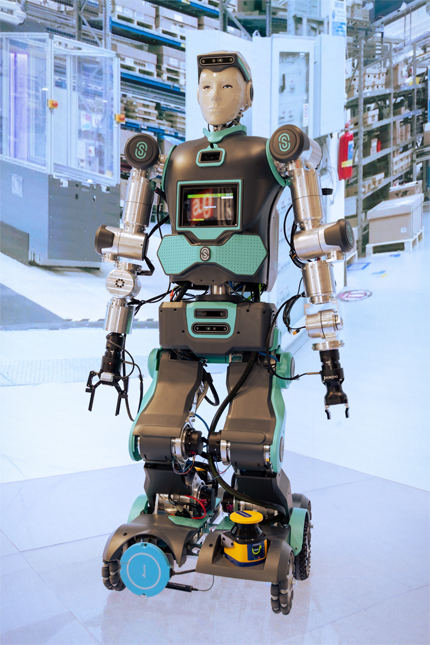
Humanoid robot
From mobile robots to thinking about
giving them a human appearance, the step was short, and as early as the 1990s
the first applications emerged.
The evolution of anthropomorphic robots has followed
various paths, on the one hand to make them look more and more human especially
in civilian applications (assistants in retail outlets, health care facilities,
etc.), and on the other hand to better exploit biomechanical capabilities in
heavy or repetitive work as an aid or replacement for humans.
For example, the
Italian company Oversonic Robotics is already on the market with Robee, which
is an industrial cobot and can assist humans in the most demanding and repetitive tasks in a range of
production and logistics industries.
This will help to
reduce the strain on workers and increase efficiency.
Datasensing is collaborating with
Oversonic and providing the SLS safety laser scanner that guides Robee's movement safely, as well as already
having other sensors and devices in development for machine vision in step with
the ever-faster evolution of robotics.